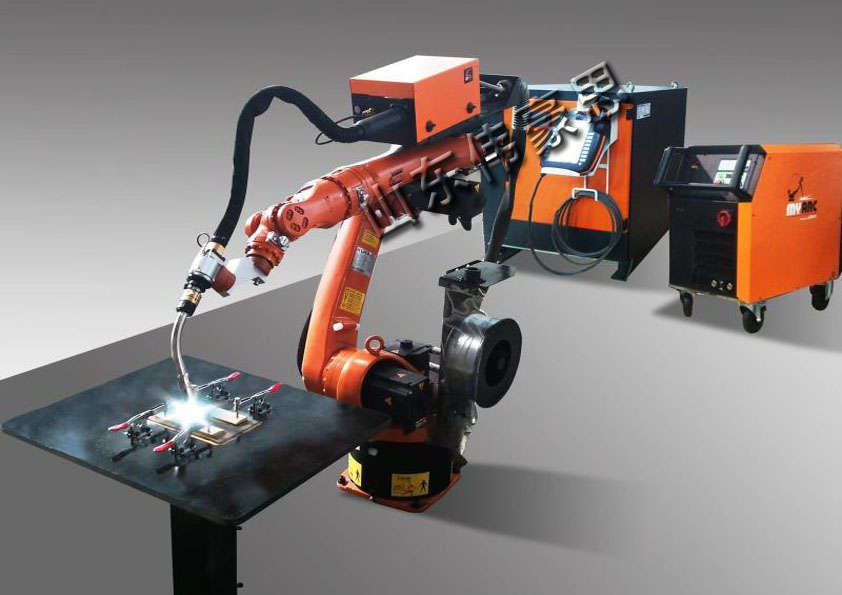
激光焊接机器人的臂和腕是基本动作部分。任何一种设计的机器人臂部都有三个自由度,以保证臂的端部能够到达其工作范围内的任何一点。腕部的三个自由度是绕空间相互垂直的三个坐标轴x、y、z的回转运动,一般称其为滚转、俯仰和偏转运动。
咨询电话:
13258092017
联系人:李经理
手机:13258092017
传真:0536-4708668
网址:www.sdwhs.cn
地址:山东省潍坊市综合保税区规划路以北、高三路以西1号楼418室
来源: 时间:2019-12-01 09:22:10 浏览次数:
激光焊接机器人的臂和腕是基本动作部分。任何一种设计的机器人臂部都有三个自由度,以保证臂的端部能够到达其工作范围内的任何一点。腕部的三个自由度是绕空间相互垂直的三个坐标轴x、y、z的回转运动,一般称其为滚转、俯仰和偏转运动。
Copyright © 2019 山东伟豪思智能仓储装备有限公司 版权所有 All Rights Reserved